Nearly 30 years after the first launch of a GLONASS spacecraft, Russia is moving to add code division multiple access (CDMA) signals to the frequency division multiple access (FDMA) format that has set the world’s second-oldest GNSS apart from GPS and other systems under development.
Nearly 30 years after the first launch of a GLONASS spacecraft, Russia is moving to add code division multiple access (CDMA) signals to the frequency division multiple access (FDMA) format that has set the world’s second-oldest GNSS apart from GPS and other systems under development.
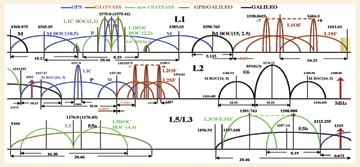
A February 15, 2008, government decree on new GLONASS requirements calls for open CDMA signals with a binary offset carrier or BOC (2,2) signal structure centered at 1575.42 MHz and a BOC (4,4) signal centered at 1176.45 MHz — essentially corresponding to the center points of GPS signals at the L1 and L5 frequencies and nearby Galileo and Compass signals. An additional GLONASS FDMA signal will be located at L3 frequencies (1197.648–1212.255 MHz), just below the GPS M-code at L2.
Russia will implement the new signals on the next-generation GLONASS-K satellites, with the first launch currently expected in late 2010 and flight testing the following year.
Use of FDMA GNSS techniques, in which the same code is used to broadcast navigation signals on different frequencies, and the placement of civil GLONASS transmissions on frequencies between 1598.0625 and 1606.5 MHz well above the GPS L1 band, have complicated the design of combined GLONASS/GPS receivers, particularly low-cost equipment for mass market applications.
The new performance requirements and modernization plans were described in an April 7 presentation at the Moscow International Satellite Navigation Forum, by Yuri Urlichich, general director of the Russian Institute for Space Device Engineering (RISDE) and chief designer for GLONASS, and by Sergey Revnivykh, deputy director of the Russian Space Agency’s Central Research Institute for Machine Building (TsNIIMASH) and head of the Information Analysis Center for Positioning, Navigation, and Time, addressing an April 23 plenary session at the European Navigation Conference 2008 in Toulouse, France.
Under the new plan, Russia will continue expansion of its ground control network, including establishment of new monitoring stations outside Russia’s borders for the first time. Improved timing and orbit determination are planned to enable the system to match GPS system performance by 2012.
GLONASS is in the seventh year of a 10-year plan to rebuild and modernize the system. Funding under that plan is committed through 2011, with additional revenues now being sought to support the new requirements document, Revnivykh said.
Revnivykh noted the personal backing that GLONASS has received from former President Vladimir Putin, whose term ended May 7. He has since been appointed prime minister by his successor Dimitri Medvedev. “We appreciate that as president Mr. Putin has been a big supporter of GLONASS. We hope that he will be a supporter as prime minister.”
GLONASS positioning and timing accuracy are currently about seven years behind that of GPS, Renivykh said. Nonetheless, improved atomic clocks on board modernized GLONASS satellites (GLONASS-M) launched in recent years have already produced substantially improved user range error (URE) figures, he added.
Adding the CDMA signals reflects the Russian government’s mandate to increase compatibility and interoperability with open services provided by other GNSS systems, driven in part by a desire to accelerate adoption of GLONASS in consumer products.
Talks are under way by joint technical working groups with the United States and Europe to further increase signal compatibility, including possible adoption of the multiplex BOC waveform agreed to by the latter two countries for new L1 civil signals in GPS and Galileo.
“We want to provide benefits for all civil users,” Revnivykh told a press conference at the ENC 2008. “But we also have to take into account that GLONASS is a dual-use [civil/military] system and that security issues are involved.”
He added that a completed GLONASS constellation will all GLONASS-K or later generations of satellites should be in place in the 2017–2020 time frame. “We have to ask what would be the greatest benefit of signal designs to users then.”
The GLONASS constellation will ultimately be expanded from the current fully operational constellation (FOC) of 24 satellites to 30 satellites “at a minimum,” Revnivykh said. However, creation of a larger constellation will require upgrades to the GLONASS control segment, which currently can handle only 24 spacecraft.
Russia currently has 16 operational satellites in orbit and plans to add another six GLONASS-M satellites this year with triple-spacecraft launches in September and November. Three remaining older-generation GLONASS satellites will be decommissioned by the end of this year, Revnivykh added.
Unlike the older satellites, the GLONASS-K generation will be unpressurized, which should improve their robustness. If the older models lose pressure, components not designed to operate in space vacuum may fail.
Terrestrial and space-based augmentation systems are also under development to improve real-time accuracy of GLONASS. This includes densifying the network of reference stations for generating and transmitting differential corrections, which would grow from the current 9 stations to 19.
Ground control and monitoring facilities have hardware and software upgrades under way to improve the accuracy and integrity monitoring of GLONASS and GPS satellite signals. Improved accuracy of clocks and orbit determination resulting from the first phase of this modernization has reduced the average signal-in-space user range error (URE) from 3.9 to 1.8 meters since the first of the year — still well above that of GPS, which is less than 1 meter.
The modernization plan also supports design and manufacture of GLONASS or combined GLONASS/GPS for military and other government users of navigation equipment, as well as assistance for designing and manufacturing of combined GLONASS/GPS/Galileo equipment to help develop mass-market navigation services.
In his presentation, Urlichich presented data released in January 2008 by the Mobile Research Group, which predicts that the Russian market for GNSS-based car navigation systems will grow to 160,000 units from 80,000 in 2007 and about 30,000 in 2006.
Survey responses from 2,791 visitors to Russia’s R&D.CNews website in 2007 indicated that only 4 percent currently have GLONASS/GPS receivers but that 36 percent wanted to buy such equipment. Another 17 percent said that they wanted to buy GLONASS-only receivers.
Russia is a member of the UN-supported International Committee on GNSS (ICG) and its Providers Forum. It will host the fourth meeting of the committee in Sochi on the Black Sea in the autumn of 2009.



